SKILLS & EXPERIENCE |
Mechanical Engineering

GovTech Singapore
2019 - current
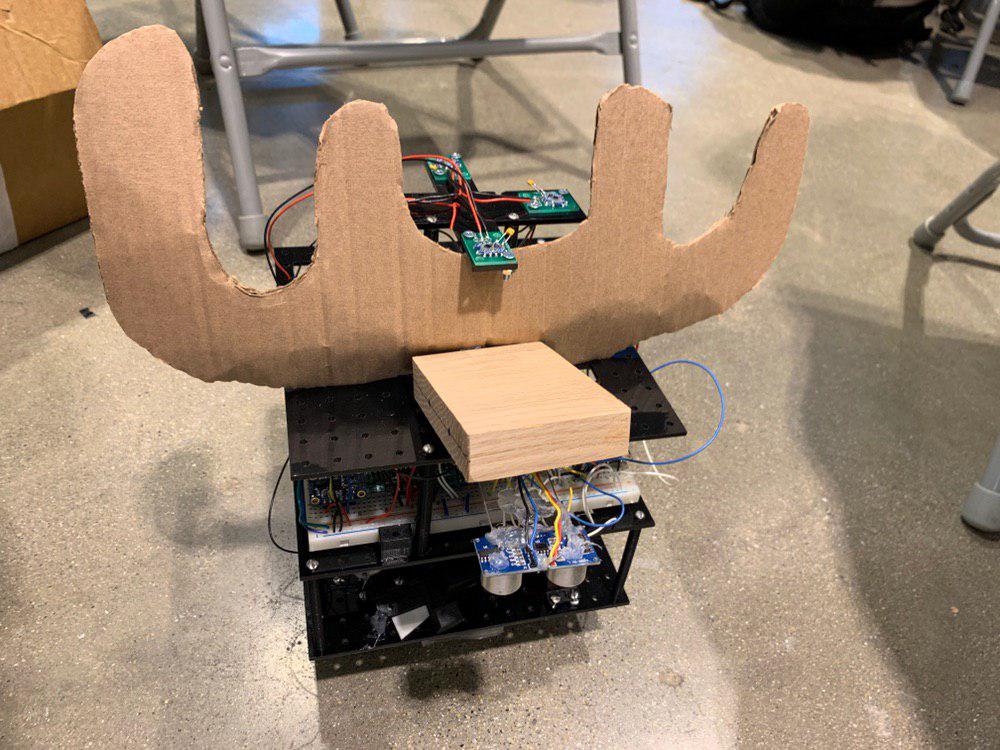
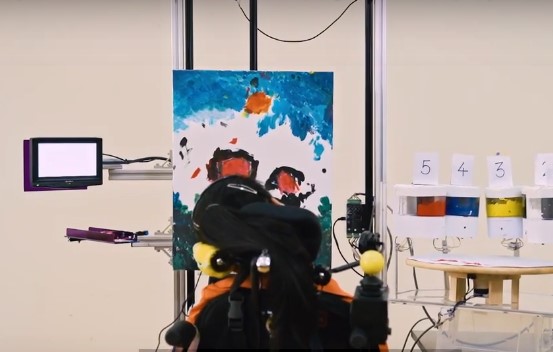
Designed and assembled various prototypes under the Sensors and IoT Department, such as a robotic, voice-activated structure for artistic expression, an interface module to connect low-cost buttons, and a hardware design for low-cost physical buttons for persons with disabilities.
Prototyped and designed the case and a mechanical trigger for temperature taking machines in Singapore's COVID-19 response. Part of the team that delivered Automated Temperature Sensing Stations to community centers and elderly homes around Singapore.
Built physical and software automation tools for failure analysis and benchmarking in prototypes.
CAD | Python | C | C++

Hubly Surgical
2019
Designed and prototyped iterations of the core MVP for intercranial access.
Solidworks | CAD
Application Design

Northwestern University
2019
Consulting and development for Biomedical Engineering and Mechanical Engineering Final Year Project (FYP) Teams on their electronics designs.
Designed and assembled PCBs for clients as well as provided input on the electronics design to increase sensitivity of sensors.
EAGLE | EDA
Simple Wireless Measurement Tool
2021 - current
Designed a wireless measurement device that allows wireless measurements of ultra low power IoT devices remotely over Bluetooth.
This project features multiple redesigns of the base board to simplify and narrow down on the key tools needed, as well as provides an app to interface with it on a phone.
KiCAD | EDA | Flutter | C
Software Development

Renoster Systems
Designed and prototyped a long-range, mesh networking system for remote gunshot detection in wildlife reserves. Wrote both collection-tree protocols and managed-flood algorithms in Python to control the mesh network and to coordinate recording times. Wrote the hardware code for running the LoRa and audio capture subsystems.
Built an analysis tool in Python to simulate timing jitter in trilateral audio detection and to calculate the resultant area to be searched.
Python | Cloud | IoT
Web Scraping
2020 - 2021
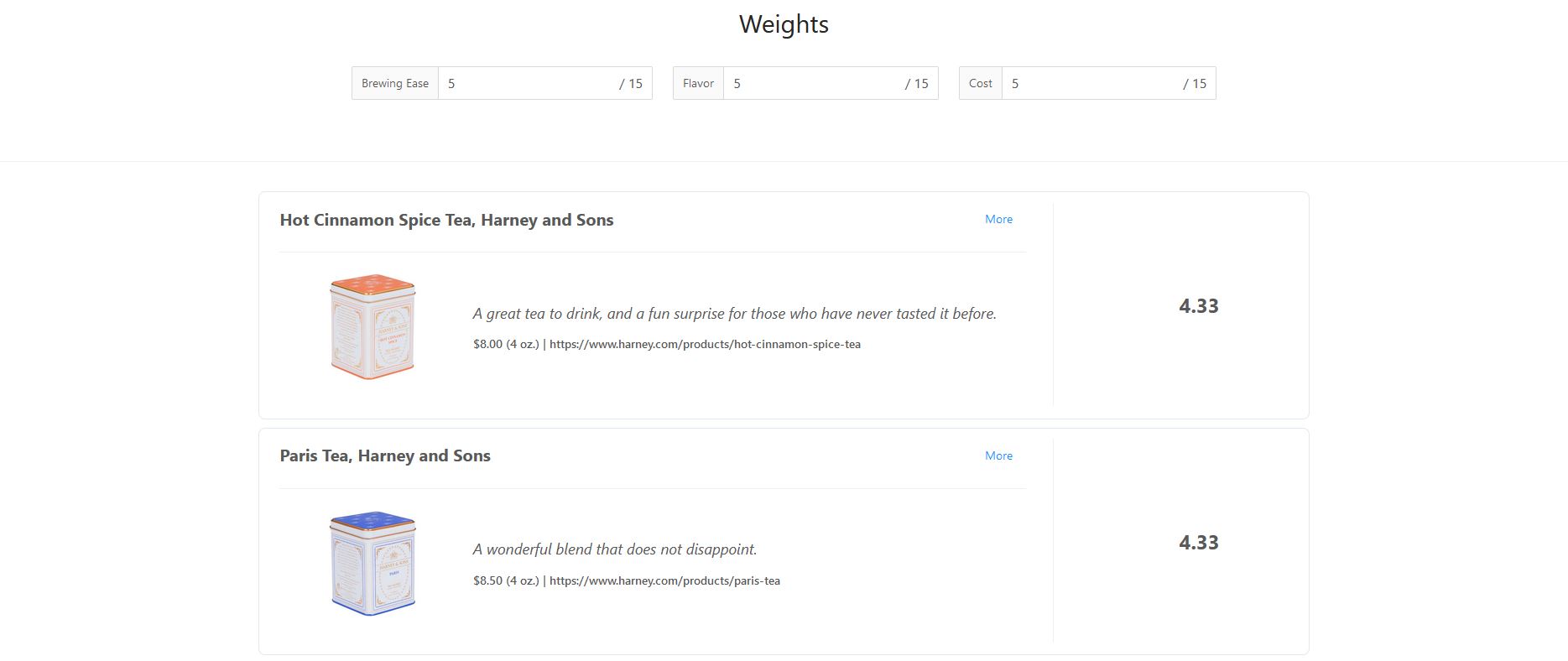
Wrote webscraping tools in Python to automate collection of video description data.
Python
Bus App
2020 - 2021
Built an app to display incoming bus timings in Singapore to help make "should I walk or should I wait" decisions when waiting for the bus
Check out the post series here exploring the use of different technologies to build a modern PWA. Featuring servers, serverless, frontend, as well as scripting technologies.
Python | JS | NodeJS | React | Vue
NOTABLE PROJECTS |